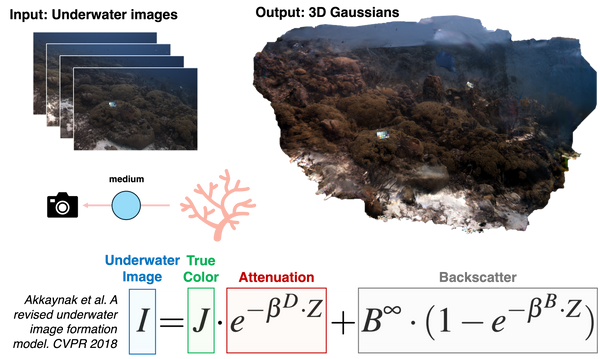
robotics SeaSplat: Representing Underwater Scenes with 3D Gaussian Splatting and a Physically Grounded Image Formation Model We introduce SeaSplat, a method to enable real-time rendering of underwater scenes leveraging recent advances in 3D radiance fields. Underwater scenes are challenging visual environments, as rendering through a medium
ecology Workshop: Robots for Understanding Natural Ecosystems We are excited to announce a new workshop titled "Robots for Understanding Natural Ecosystems" that we're hosting at the upcoming ICRA 2024, in Yokohama, Japan on May 17th! The workshop
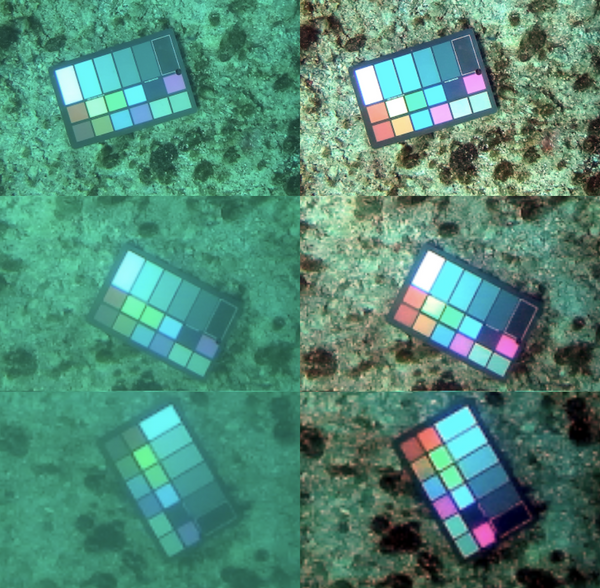
publication DeepSeeColor Successful applications of complex vision-based behaviours underwater have lagged behind progress in terrestrial and aerial domains. This is largely due to the degraded image quality resulting from the physical phenomena
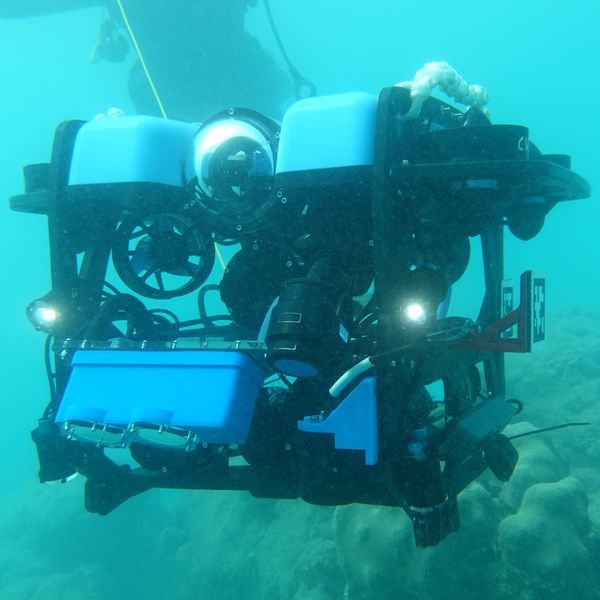
Projects CUREE: A Curious Robot for Ecosystem Exploration Coral reefs worldwide are threatened by anthropogenic disturbances and climate change. New tools are needed to scale up monitoring of coral reefs to understand reef ecosystems, rapidly assess biodiversity, and
publication Semi-supervised Visual Tracking of Marine Animals Using Autonomous Underwater Vehicles VMAT Dataset link Supplementary videos link In-situ visual observations of marine organisms is crucial to developing behavioural understandings and their relations to their surrounding ecosystem. Typically, these observations are collected
Co-Robotic Exploration A day in the field, testing CUREE WARPLab is in St. Johns, USVI from July 25 - Aug 7 2022. The focus of this op is to test new WARPAUV capabilities including audio-visual benthic surveys of coral
expedition Field Trip to St. John, US Virgin Islands We conducted robot field trials in USVI from Oct 17-Oct 30, 2021. The goal of the mission was to test our new robots, new robot behaviors, deploy acoustic sensors, and
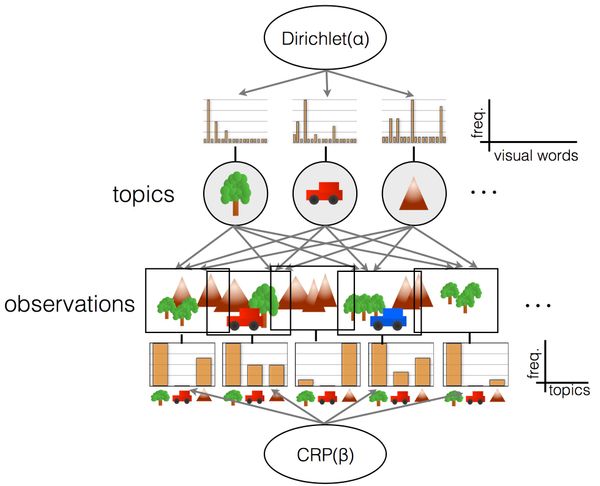
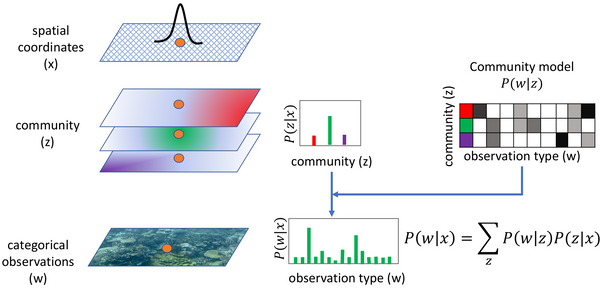
Co-Robotic Exploration Gaussian-Dirichlet Random Fields for Inference over High Dimensional Categorical Observations Categorical observations, such as observations of phytoplankton taxa, are factored into the product of a community model and spatiotemporal distributions for each community. The community model, which is the distribution
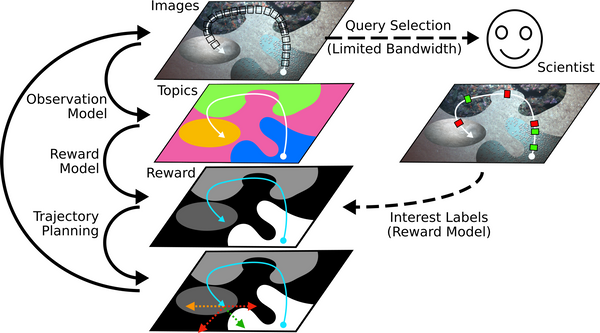
Co-Robotic Exploration Active Reward Learning for Co-Robotic Vision-Based Exploration in Bandwidth Limited Environments Proposed approach to co-robotic exploration that models the interest of the operator over a low bandwidth communication channel and uses the learned reward model to plan the most rewarding (in
Co-Robotic Exploration Information-Guided Robotic Maximum Seek-and-Sample in Partially Observable Continuous Environments We present Plume Localization under Uncertainty using Maximum-ValuE information and Search (PLUMES), a planner for localizing and collecting samples at the global maximum of an a priori unknown and partially
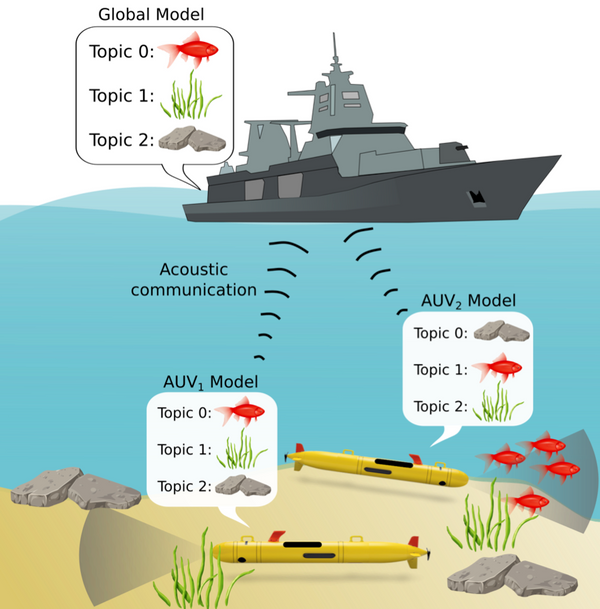
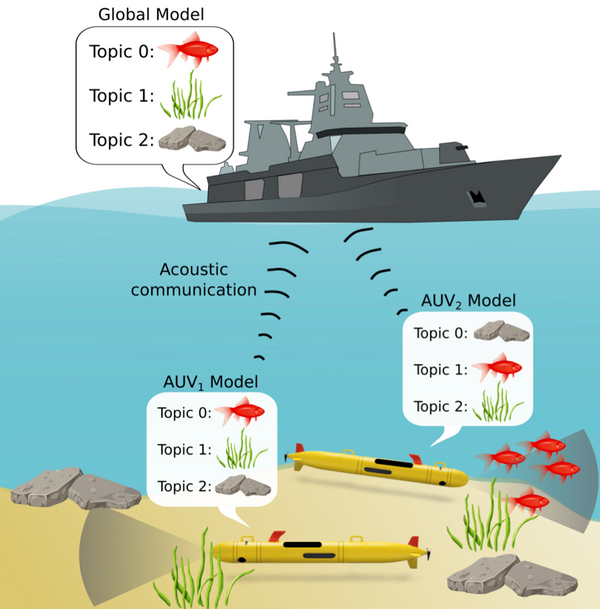
Co-Robotic Exploration ICRA2019: Streaming Scene Maps for Co-Robotic Exploration in Bandwidth Limited Environments Abstract This work proposes a bandwidth tunable technique for real-time probabilistic scene modeling and mapping to enable co-robotic exploration in communication constrained environments such as the deep sea. The parameters
Co-Robotic Exploration Barbados 2019 Field Trials We just successfully completed our 2019 robot field trials at the Bellairs Research Institute 2019 Sea Trials in Holetown, Barbados. The main goals of the trials were to test our
Co-Robotic Exploration IROS2018: Approximate Distributed Spatiotemporal Topic Models for Multi-Robot Terrain Characterization. Our paper on enabling distributed learning in bandwidth limited environments was one of the finalists for the best paper award at IROS 2018 (6 finalists among 1,254 accepted). Abstract:
video Film: Coding Curiosity A short film by Laura Castanon et. al, describing the exploration robotics research happening in WARPLab.
Projects Co-Robotic Exploration in Bandwidth Constrained Environments This project addresses the control and communications among underwater robotic vehicles to explore and map in ocean environments, where the communications are inherently low bandwidth, may be degraded and even
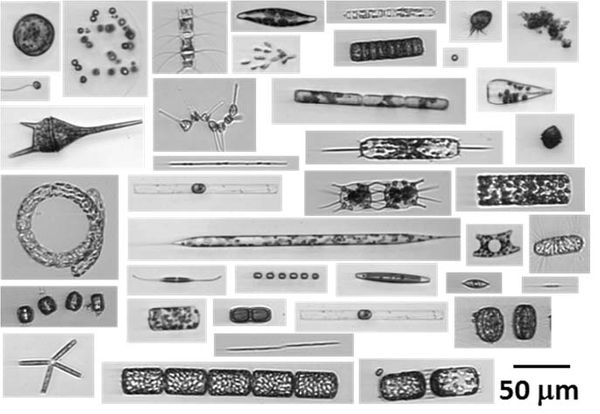
papers Learning Seasonal Phytoplankton Communities with Topic Models [2nd prize in the student poster competition at the OCEANS17] We have developed a probabilistic generative model for phytoplankton communities. The proposed model takes counts of a set of phytoplankton taxa in a timeseries as its training data, and models
papers ICRA 2017: Phytoplankton Hotspot Prediction With an Unsupervised Spatial Community Model Many interesting natural phenomena are sparsely distributed and discrete. Locating the hotspots of such sparsely distributed phenomena is often difficult because their density gradient is likely to be very noisy.
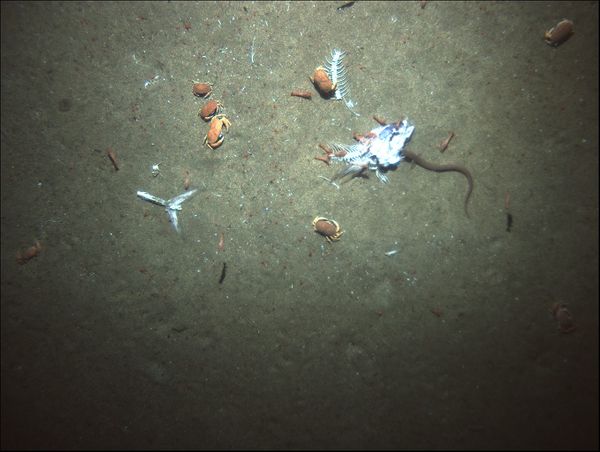
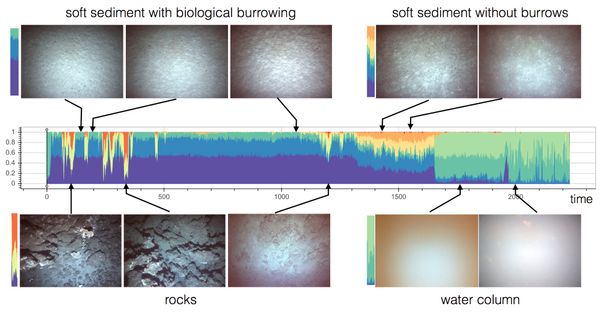
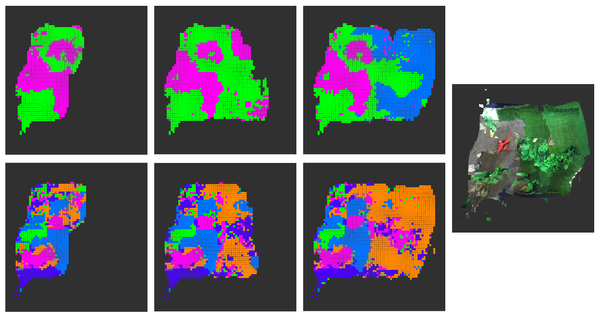
Visualizing AUV missions to Hannibal seamount The following visualizations correspond to 16 dives by the SeaBed AUV at Hannibal seamount in Panama in 2015. These visualizations demonstrate that the learned model is automatically able to characterize
Field Trip: Using robots for characterizing coral reef soundscapes in US Virgin Islands We recently went to US Virgin Islands to do some preliminary data collection of coral reef soundscapes using a robot. This trip was also our first attempt at deploying a
Projects Robot Systems CUREE: A Curious Underwater Robot for Ecosystem ExplorationCUREE: A Curious Underwater Robot for Ecosystem Exploration Robots with alternative locomotion design can assist us in observing previously inaccessible environments. MARE: Marine
Projects Sensing the world, abstractly. We want our robots to sense the world at varying levels of abstraction. From raw sensor value, to terrain type, to habitat type. ROST[1] is a technique for semantic
expedition Expedition to Hannibal Seamount, Panama, 2015 In June 2015, we conducted an expedition to Hannibal Bank, a seamount and an ecological hotspot in the coastal eastern tropical Pacific Ocean off Panama, and explored the zonation, biodiversity,
Projects Interactive Exploration of Mission Data ROST can automatically characterize large image datasets, identify various scene components and detect context aware anomalies. These automatically annotated datasets can then be visualized using various techniques. Interactive mission visualizations
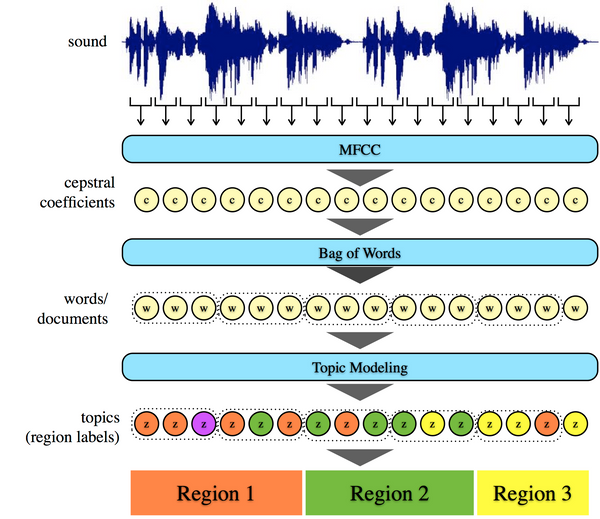
Projects Soundscape Characterization This work explores the problem of automatic discovery of different acoustic regions in the world, as experienced by a mobile robot. We use a temporally smoothed variant of Latent Dirichlet
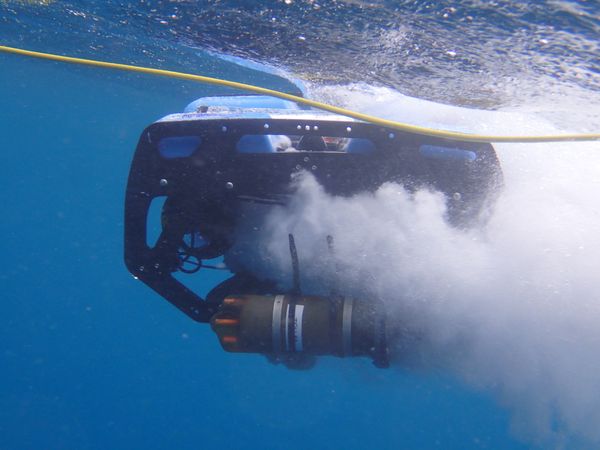
exploration Curious Exploration Robots There is a need for autonomous exploration robots because vast majority of our oceans are unexplored, and direct human exploration of the deep sea is an expensive and extremely dangerous






![Learning Seasonal Phytoplankton Communities with Topic Models [2nd prize in the student poster competition at the OCEANS17]](/content/images/size/w600/2017/09/theta_mod.png)