Projects CUREE: A Curious Robot for Ecosystem Exploration Coral reefs worldwide are threatened by anthropogenic disturbances and climate change. New tools are needed to scale up monitoring of coral reefs to understand reef ecosystems, rapidly assess biodiversity, and
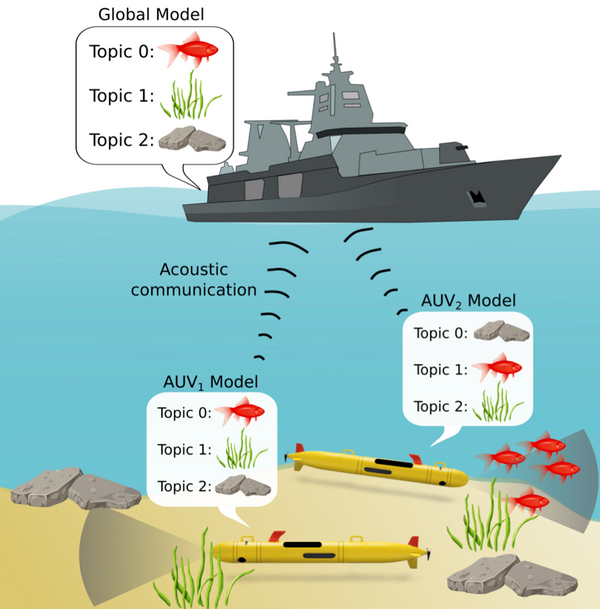
Projects Co-Robotic Exploration in Bandwidth Constrained Environments This project addresses the control and communications among underwater robotic vehicles to explore and map in ocean environments, where the communications are inherently low bandwidth, may be degraded and even
Projects Robot Systems CUREE: A Curious Underwater Robot for Ecosystem ExplorationCUREE: A Curious Underwater Robot for Ecosystem Exploration Robots with alternative locomotion design can assist us in observing previously inaccessible environments. MARE: Marine
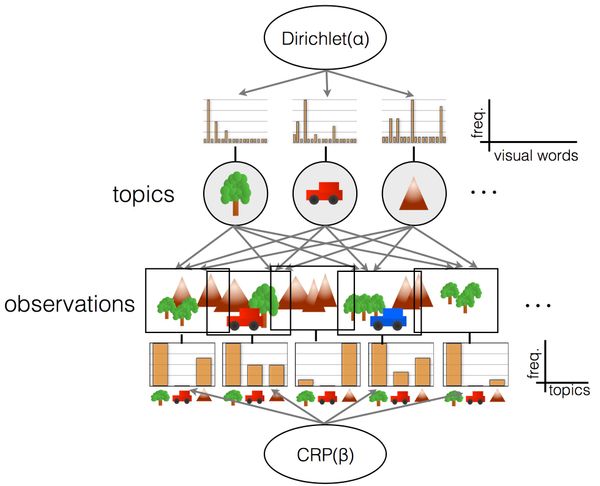
Projects Sensing the world, abstractly. We want our robots to sense the world at varying levels of abstraction. From raw sensor value, to terrain type, to habitat type. ROST[1] is a technique for semantic
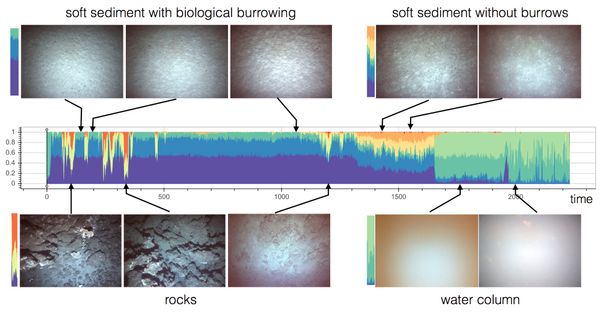
Projects Interactive Exploration of Mission Data ROST can automatically characterize large image datasets, identify various scene components and detect context aware anomalies. These automatically annotated datasets can then be visualized using various techniques. Interactive mission visualizations
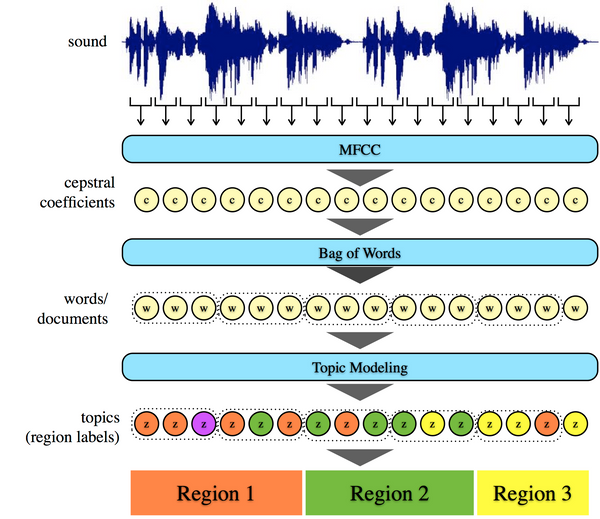
Projects Soundscape Characterization This work explores the problem of automatic discovery of different acoustic regions in the world, as experienced by a mobile robot. We use a temporally smoothed variant of Latent Dirichlet
exploration Curious Exploration Robots There is a need for autonomous exploration robots because vast majority of our oceans are unexplored, and direct human exploration of the deep sea is an expensive and extremely dangerous