
CUREE: A Curious Underwater Robot for Ecosystem Exploration
Robots with alternative locomotion design can assist us in observing previously inaccessible environments.
MARE: Marine Autonomous Robotic Explorer[1]
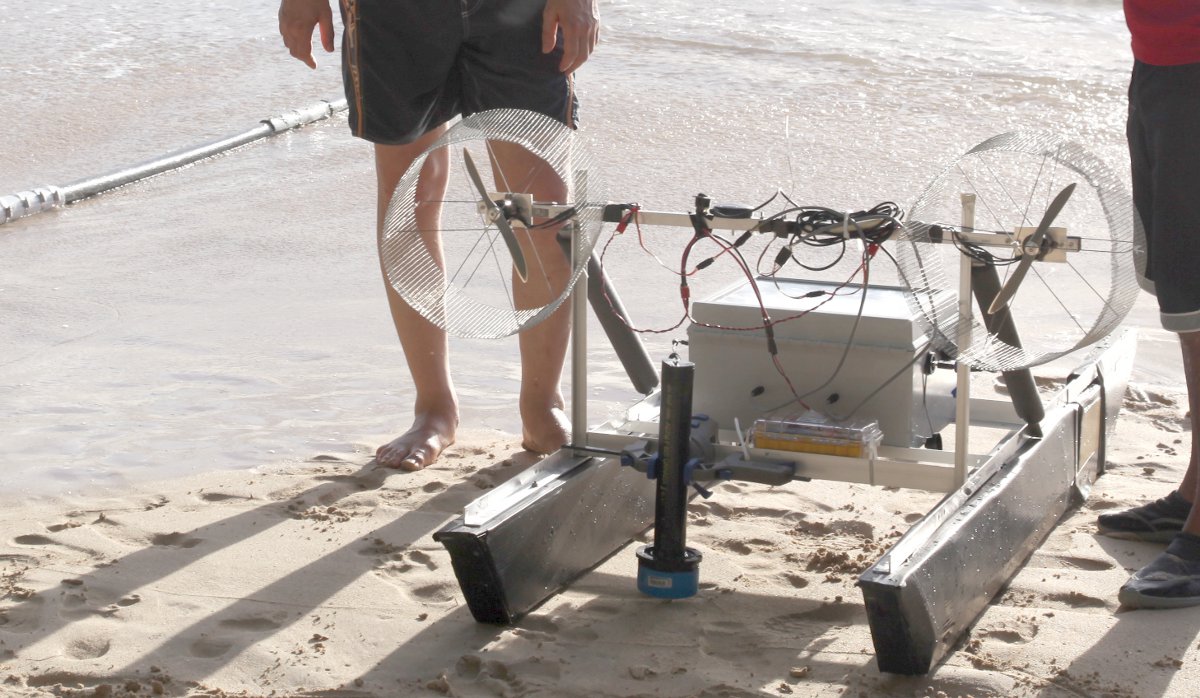
MARE is a low-cost autonomous airboat designed for exploring turbulent open water environments. It's unique air-propelled design and hydro-dynamically stable catamaran hull structure makes MARE suitable for long-term deployment in all types of water bodies. Since it has no moving parts in contact with water, MARE can explore marine ecosystems while causing minimal underwater disturbance.
Heterogeneous Robot Teams[1:1] [1:2]
 |
 |
 |
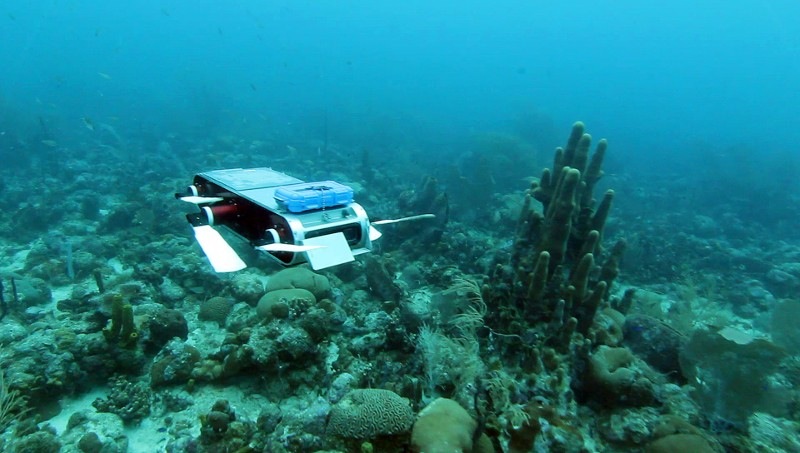
Aqua Amphibious Robot
Aqua[1:3] is an amphibious six legged robot capable of autonomous operation. Aqua's propulsion is based on six flippers that can provide motion in five degrees of freedom, which is more suitable for tasks requiring high maneuverability, such as coral reef exploration. By using a novel combination of gaits[1:4], Aqua can move at various speeds while maintaining its orientation, despite external disturbances. Figure below shows various flipper poses for different desired swimming speeds.
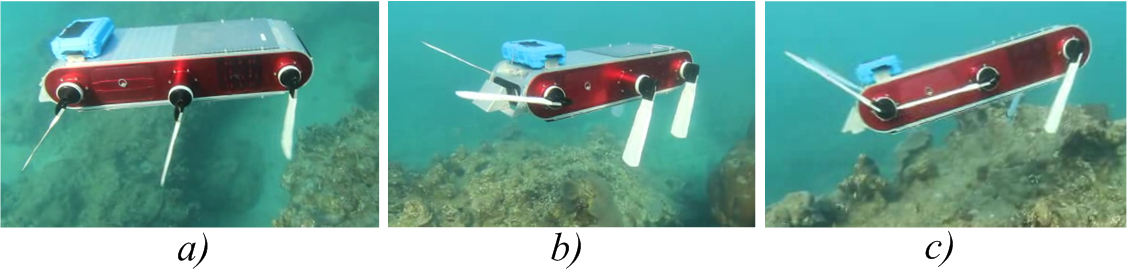
Pictures showing the flippers' angle due to the action of the autopilot system, during one of the sea trials. (a) the robot is performing a heave-up maneuver to maintain depth and attitude at zero forward speed. (b) the robot is executing a combined heave up, pitch up and slow forward speed maneuver. (c) the robot is performing a pitch-up maneuver at high
