Projects CUREE: A Curious Robot for Ecosystem Exploration Coral reefs worldwide are threatened by anthropogenic disturbances and climate change. New tools are needed to scale up monitoring of coral reefs to understand reef ecosystems, rapidly assess biodiversity, and
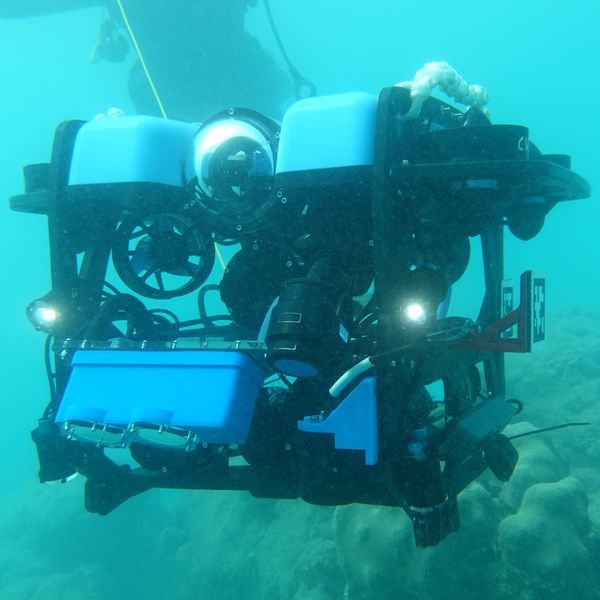
Co-Robotic Exploration A day in the field, testing CUREE WARPLab is in St. Johns, USVI from July 25 - Aug 7 2022. The focus of this op is to test new WARPAUV capabilities including audio-visual benthic surveys of coral
expedition Field Trip to St. John, US Virgin Islands We conducted robot field trials in USVI from Oct 17-Oct 30, 2021. The goal of the mission was to test our new robots, new robot behaviors, deploy acoustic sensors, and
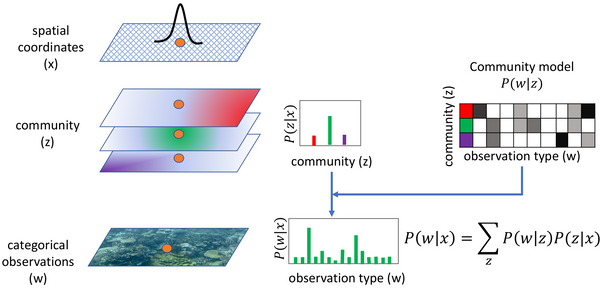
Co-Robotic Exploration Gaussian-Dirichlet Random Fields for Inference over High Dimensional Categorical Observations Categorical observations, such as observations of phytoplankton taxa, are factored into the product of a community model and spatiotemporal distributions for each community. The community model, which is the distribution
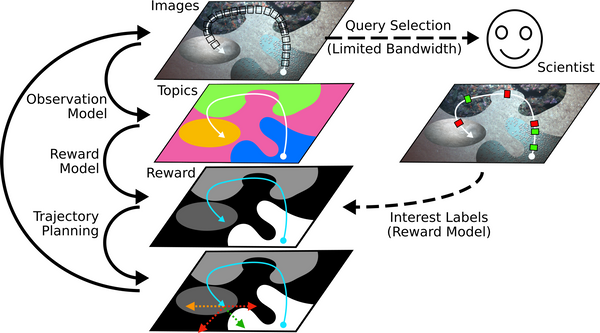
Co-Robotic Exploration Active Reward Learning for Co-Robotic Vision-Based Exploration in Bandwidth Limited Environments Proposed approach to co-robotic exploration that models the interest of the operator over a low bandwidth communication channel and uses the learned reward model to plan the most rewarding (in
Co-Robotic Exploration Information-Guided Robotic Maximum Seek-and-Sample in Partially Observable Continuous Environments We present Plume Localization under Uncertainty using Maximum-ValuE information and Search (PLUMES), a planner for localizing and collecting samples at the global maximum of an a priori unknown and partially
Co-Robotic Exploration ICRA2019: Streaming Scene Maps for Co-Robotic Exploration in Bandwidth Limited Environments Abstract This work proposes a bandwidth tunable technique for real-time probabilistic scene modeling and mapping to enable co-robotic exploration in communication constrained environments such as the deep sea. The parameters
Co-Robotic Exploration Barbados 2019 Field Trials We just successfully completed our 2019 robot field trials at the Bellairs Research Institute 2019 Sea Trials in Holetown, Barbados. The main goals of the trials were to test our
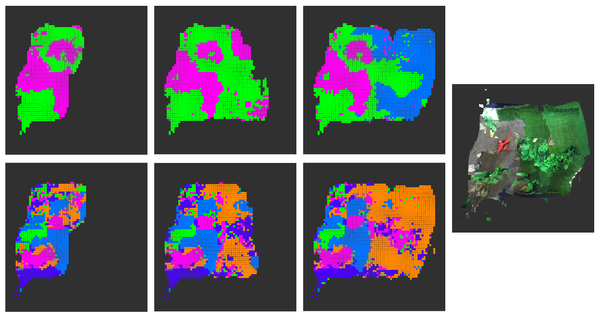
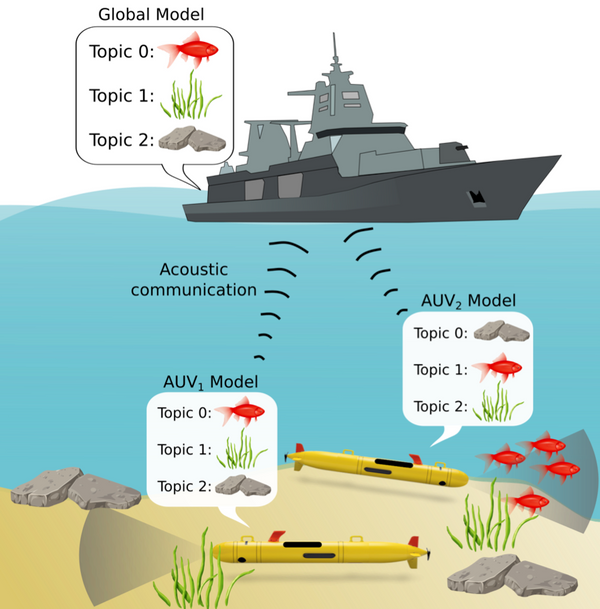
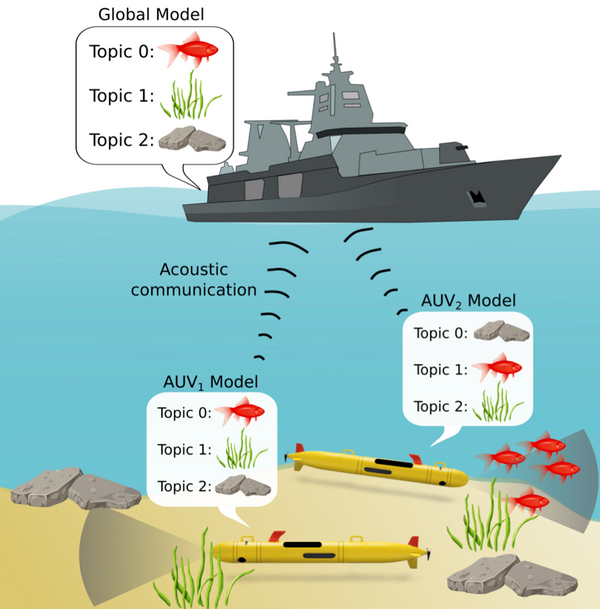
Co-Robotic Exploration IROS2018: Approximate Distributed Spatiotemporal Topic Models for Multi-Robot Terrain Characterization. Our paper on enabling distributed learning in bandwidth limited environments was one of the finalists for the best paper award at IROS 2018 (6 finalists among 1,254 accepted). Abstract:
Projects Co-Robotic Exploration in Bandwidth Constrained Environments This project addresses the control and communications among underwater robotic vehicles to explore and map in ocean environments, where the communications are inherently low bandwidth, may be degraded and even
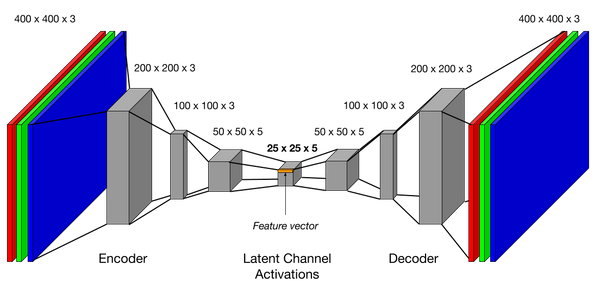
Co-Robotic Exploration IROS 2017: Feature discovery and visualization of robot mission data using convolutional autoencoders and Bayesian nonparametric topic modeling Abstract: We introduce a novel unsupervised machine learning framework that incorporates the ability of convolutional autoencoders to discover features from images that directly encode spatial information, within a Bayesian nonparametric