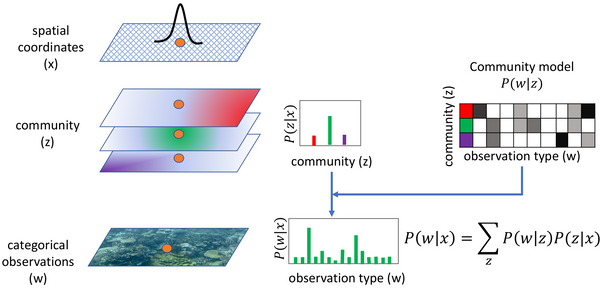
Co-Robotic Exploration Gaussian-Dirichlet Random Fields for Inference over High Dimensional Categorical Observations Categorical observations, such as observations of phytoplankton taxa, are factored into the product of a community model and spatiotemporal distributions for each community. The community model, which is the distribution
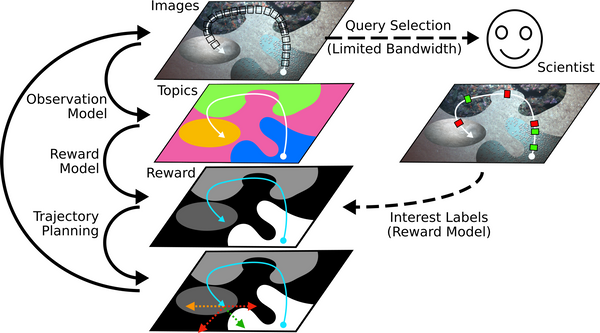
Co-Robotic Exploration Active Reward Learning for Co-Robotic Vision-Based Exploration in Bandwidth Limited Environments Proposed approach to co-robotic exploration that models the interest of the operator over a low bandwidth communication channel and uses the learned reward model to plan the most rewarding (in
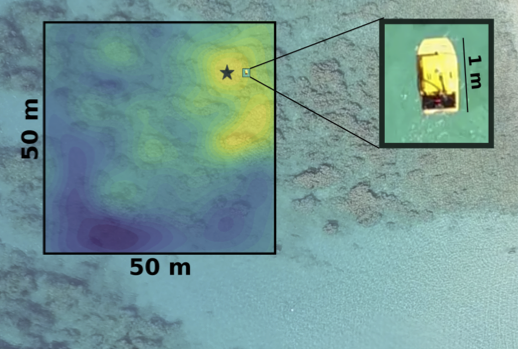
Co-Robotic Exploration Information-Guided Robotic Maximum Seek-and-Sample in Partially Observable Continuous Environments We present Plume Localization under Uncertainty using Maximum-ValuE information and Search (PLUMES), a planner for localizing and collecting samples at the global maximum of an a priori unknown and partially
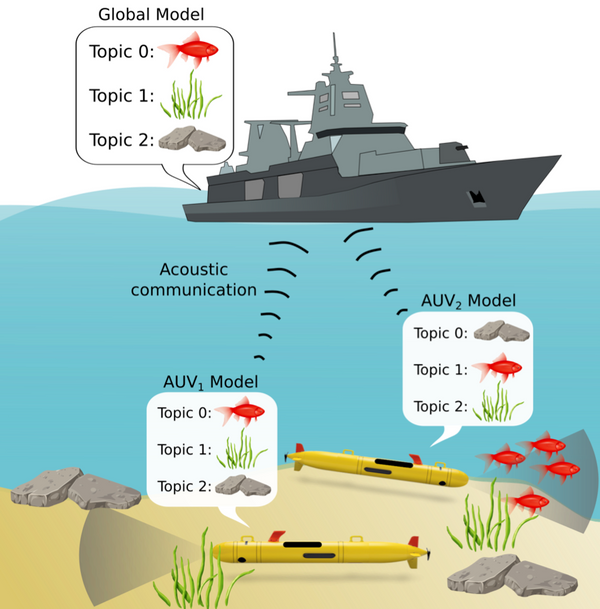
Co-Robotic Exploration ICRA2019: Streaming Scene Maps for Co-Robotic Exploration in Bandwidth Limited Environments Abstract This work proposes a bandwidth tunable technique for real-time probabilistic scene modeling and mapping to enable co-robotic exploration in communication constrained environments such as the deep sea. The parameters
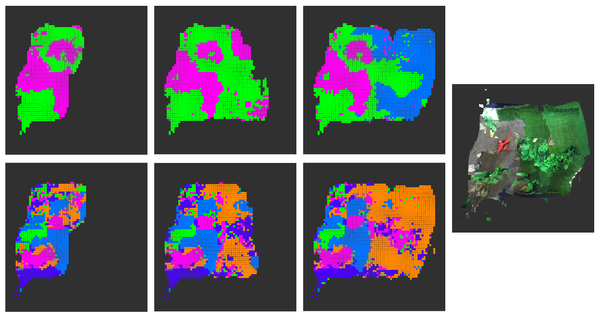
Co-Robotic Exploration IROS2018: Approximate Distributed Spatiotemporal Topic Models for Multi-Robot Terrain Characterization. Our paper on enabling distributed learning in bandwidth limited environments was one of the finalists for the best paper award at IROS 2018 (6 finalists among 1,254 accepted). Abstract:
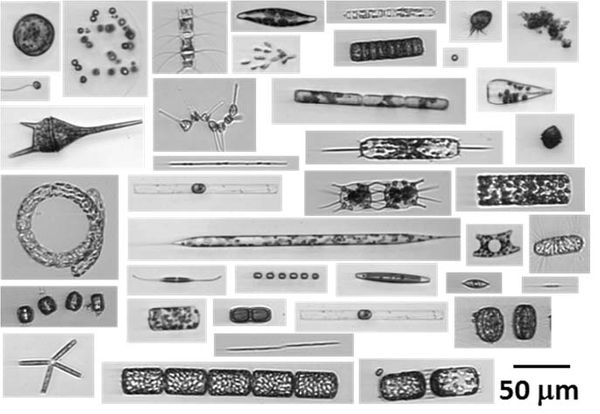
papers Learning Seasonal Phytoplankton Communities with Topic Models [2nd prize in the student poster competition at the OCEANS17] We have developed a probabilistic generative model for phytoplankton communities. The proposed model takes counts of a set of phytoplankton taxa in a timeseries as its training data, and models
papers ICRA 2017: Phytoplankton Hotspot Prediction With an Unsupervised Spatial Community Model Many interesting natural phenomena are sparsely distributed and discrete. Locating the hotspots of such sparsely distributed phenomena is often difficult because their density gradient is likely to be very noisy.
![Learning Seasonal Phytoplankton Communities with Topic Models [2nd prize in the student poster competition at the OCEANS17]](/content/images/size/w600/2017/09/theta_mod.png)