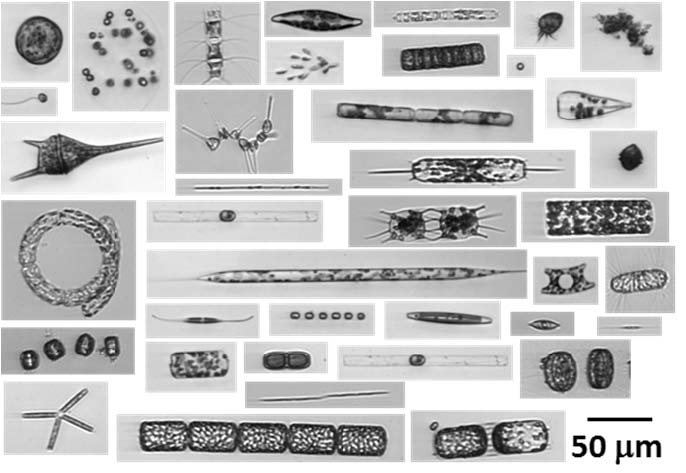
Many interesting natural phenomena are sparsely distributed and discrete. Locating the hotspots of such sparsely distributed phenomena is often difficult because their density gradient is likely to be very noisy. We present a novel approach to this search problem, where we model the co-occurrence relations between a robot's observations with a Bayesian nonparametric topic model. This approach makes it possible to produce a robust estimate of the spatial distribution of the target, even in the absence of direct target observations. We apply the proposed approach to the problem of finding the spatial locations of the hotspots of a specific phytoplankton taxon in the ocean. We use classified image data from Imaging FlowCytobot (IFCB), which automatically measures individual microscopic cells and colonies of cells. Given these individual taxon-specific observations, we learn a phytoplankton community model that characterizes the co-occurrence relations between taxa. We present experiments with simulated robot missions drawn from real observation data collected during a research cruise traversing the US Atlantic coast. Our results show that the proposed approach outperforms nearest neighbor and k-means based methods for predicting the spatial distribution of hotspots from in-situ observations.
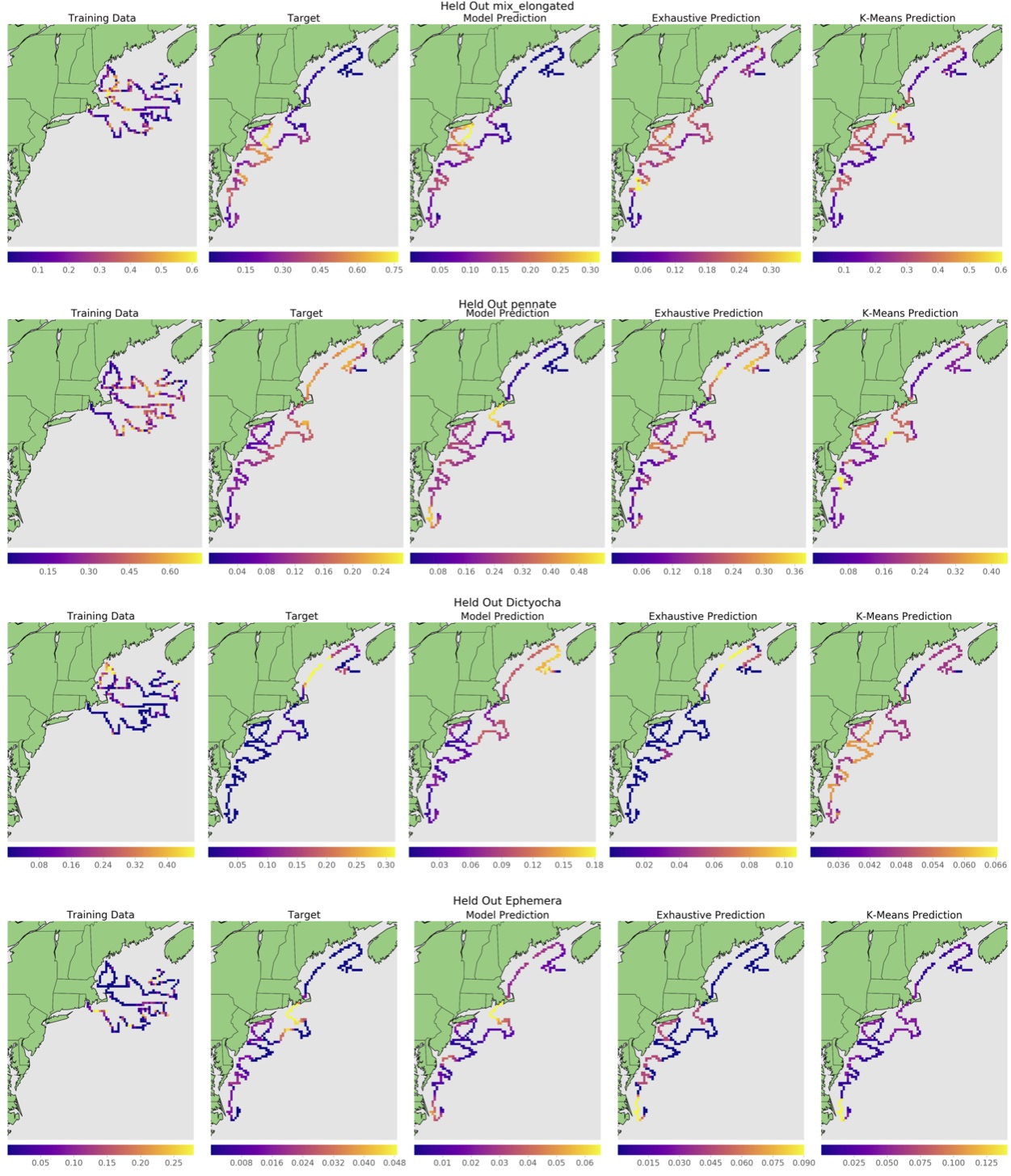
The plots above show spatial distribution for four target classes (rows) in split training/testing samples. The columns correspond to training data (col. 1), held-out target locations (col. 2) , and the three models under evaluation (col. 3-5). The proposed plankton community model provides better predictions than the simpler k-means based plankton community model, or the exhaustive nearest neighbor search.
- Kalmbach A, Girdhar Y, Sosik H, Dudek G. Phytoplankton Hotspot Prediction Using an Unsupervised Spatial Community Model. In: IEEE International Conference on Robotics and Automation.; 2017.
