USBL systems work best when there is not much horizontal distance between the transceiver and transponder. However, when deploying ROVs off a dock, there can be lots of distance between the USBL modem and robot, and unwanted acoustic artifacts that degrade the performance of the USBL system. The SlickLizard was designed to hold the modem approximately over top of the robot, as well as give the robot additional range by carrying the topside end of the tether. It communicates with the shore via a high speed internet link.
The SlickLizard is built on a boogie-board frame, with four Blue Robotics T200 thrusters for propulsion. It uses a pixhawk as the on board controller. It was designed to position a USBL modem above an ROV, to get an accurate position fix.
Overview of ROV/SlickLizard system:
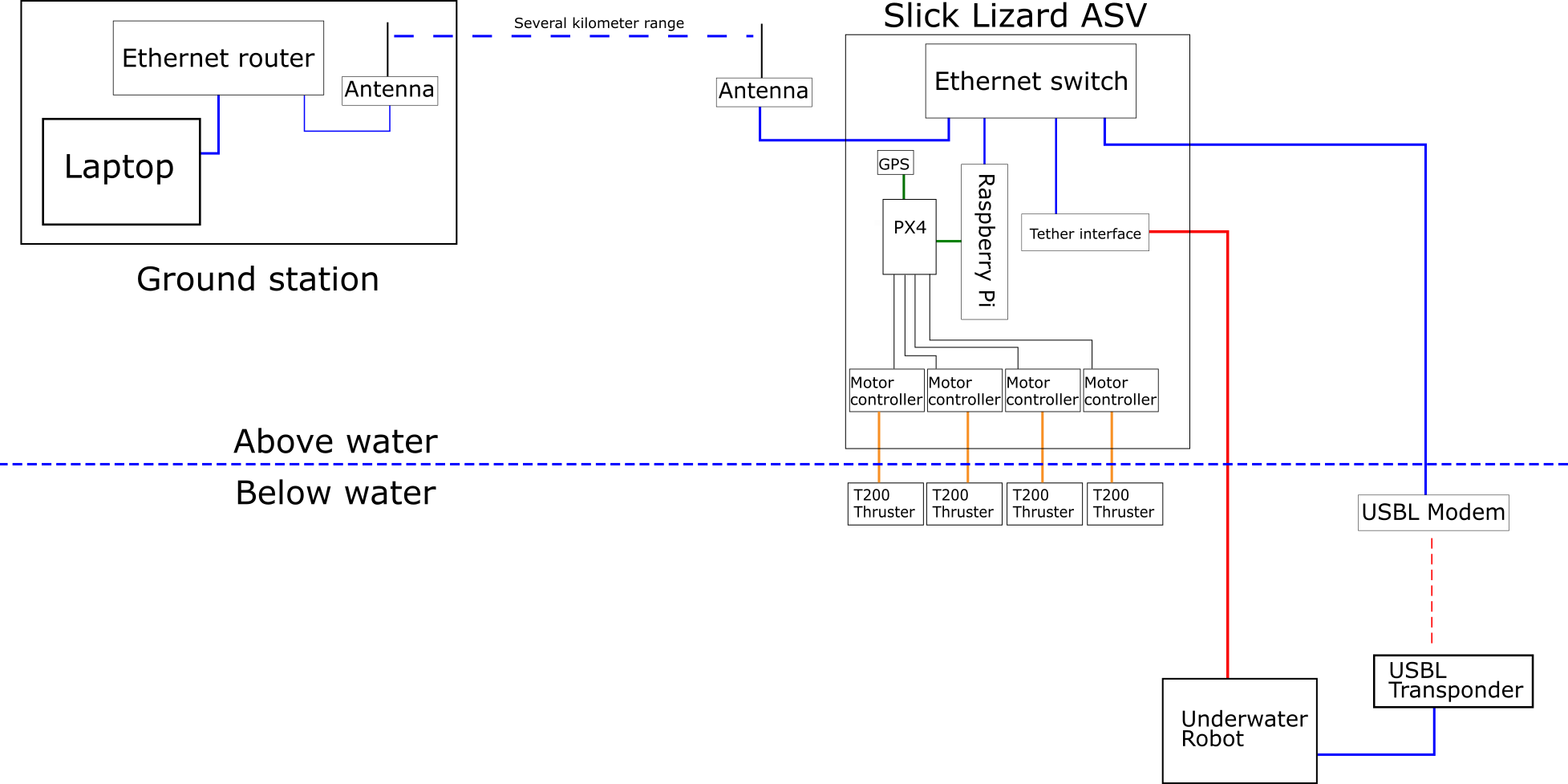
SlickLizard in action:





Insides:


SlickLizard was built by Nathan McGuire as a WARPLab high school intern, in the summer of 2017.
