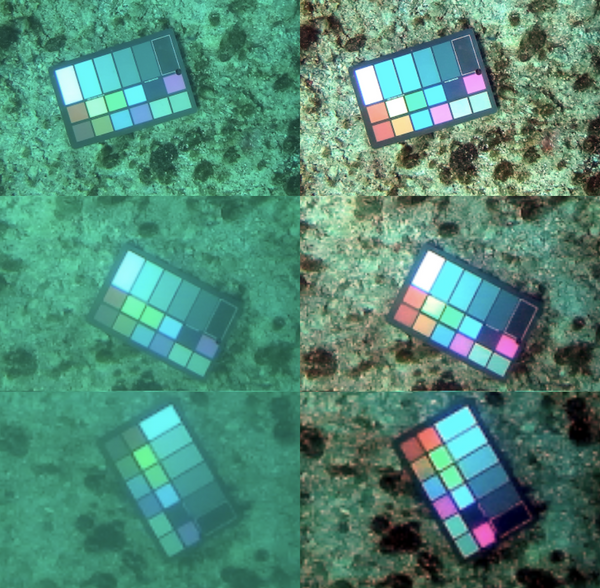
publication DeepSeeColor Successful applications of complex vision-based behaviours underwater have lagged behind progress in terrestrial and aerial domains. This is largely due to the degraded image quality resulting from the physical phenomena
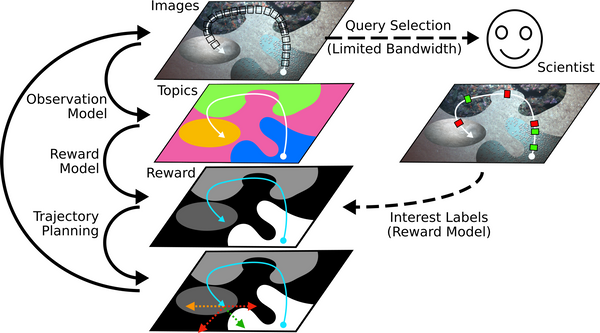
Co-Robotic Exploration Active Reward Learning for Co-Robotic Vision-Based Exploration in Bandwidth Limited Environments Proposed approach to co-robotic exploration that models the interest of the operator over a low bandwidth communication channel and uses the learned reward model to plan the most rewarding (in