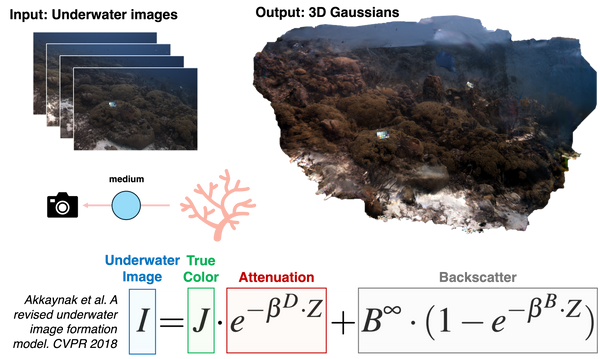
robotics SeaSplat: Representing Underwater Scenes with 3D Gaussian Splatting and a Physically Grounded Image Formation Model We introduce SeaSplat, a method to enable real-time rendering of underwater scenes leveraging recent advances in 3D radiance fields. Underwater scenes are challenging visual environments, as rendering through a medium
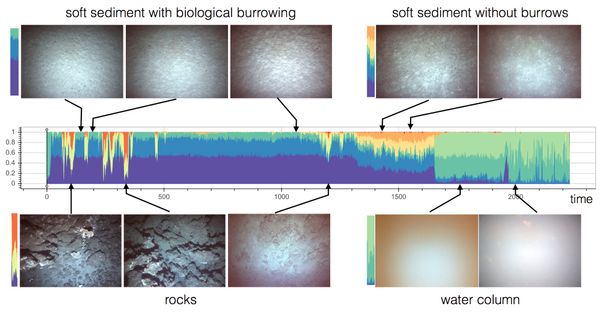
Projects Interactive Exploration of Mission Data ROST can automatically characterize large image datasets, identify various scene components and detect context aware anomalies. These automatically annotated datasets can then be visualized using various techniques. Interactive mission visualizations