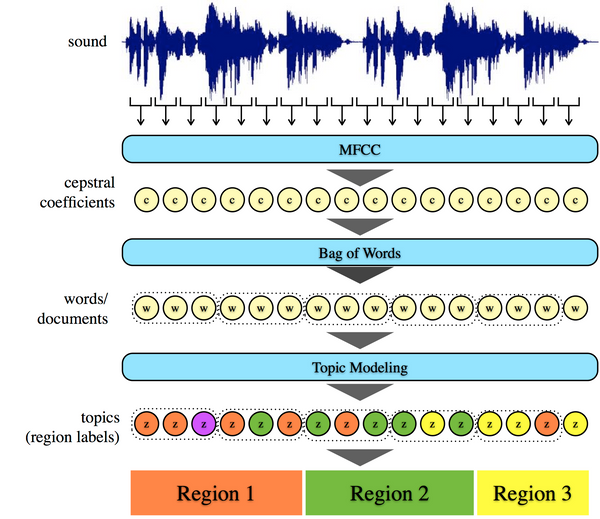
Projects Soundscape Characterization This work explores the problem of automatic discovery of different acoustic regions in the world, as experienced by a mobile robot. We use a temporally smoothed variant of Latent Dirichlet
exploration Curious Exploration Robots There is a need for autonomous exploration robots because vast majority of our oceans are unexplored, and direct human exploration of the deep sea is an expensive and extremely dangerous