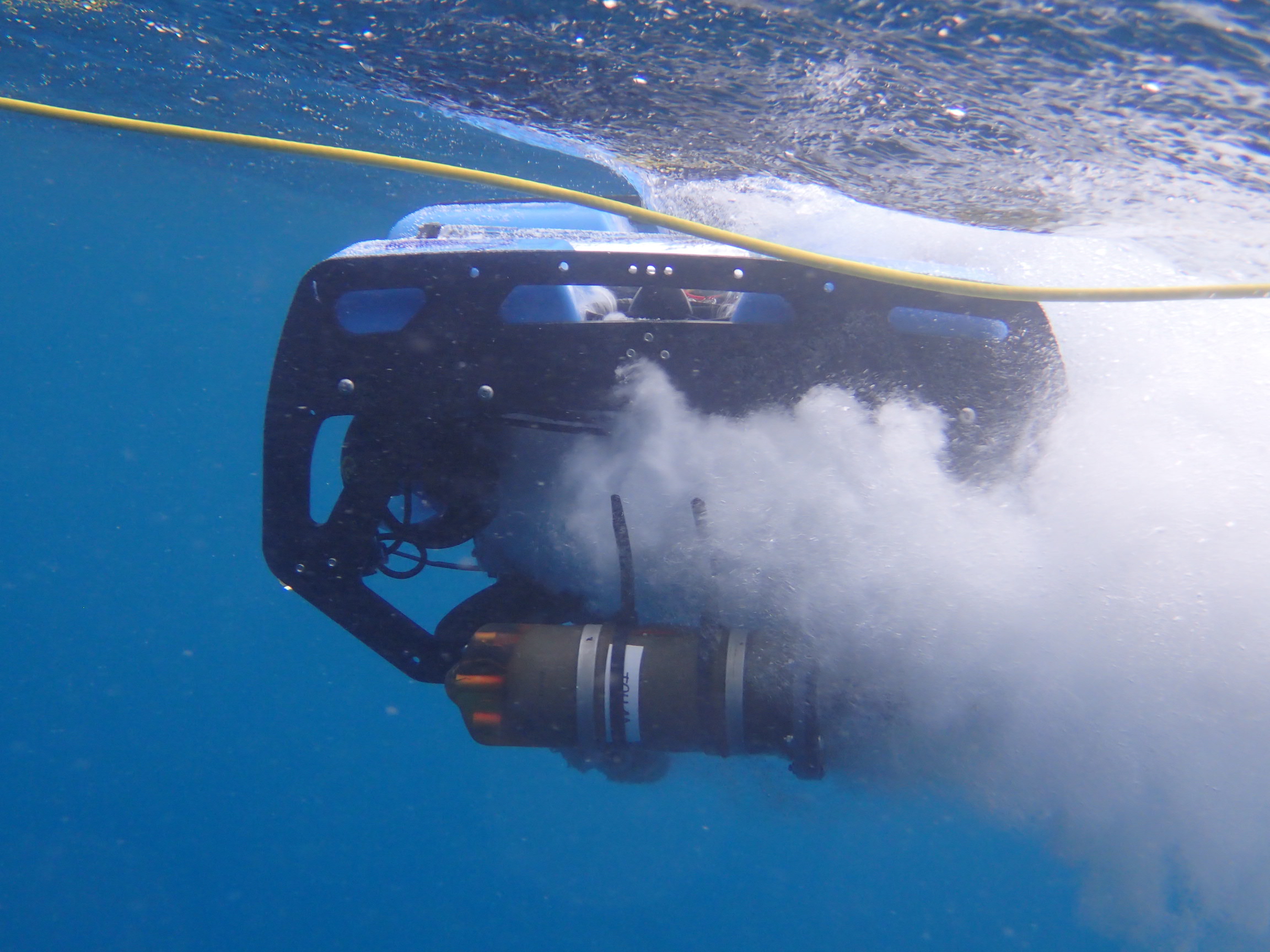
We recently went to US Virgin Islands to do some preliminary data collection of coral reef soundscapes using a robot. This trip was also our first attempt at deploying a BlueROV2 robot in the ocean.

[Aran Mooney and Yogi Girdhar deploying the the robot. Photo: Amy Apprill]
The robot was equipped with a DMON sound recorder, which enables it to capture underwater sounds at 12KHz. sampling rate.
[Photo: Amy Apprill]
We made the robot negatively buoyant, which enabled it to rest quietly on the seafloor while recording the hustle bustle of the coral reef.
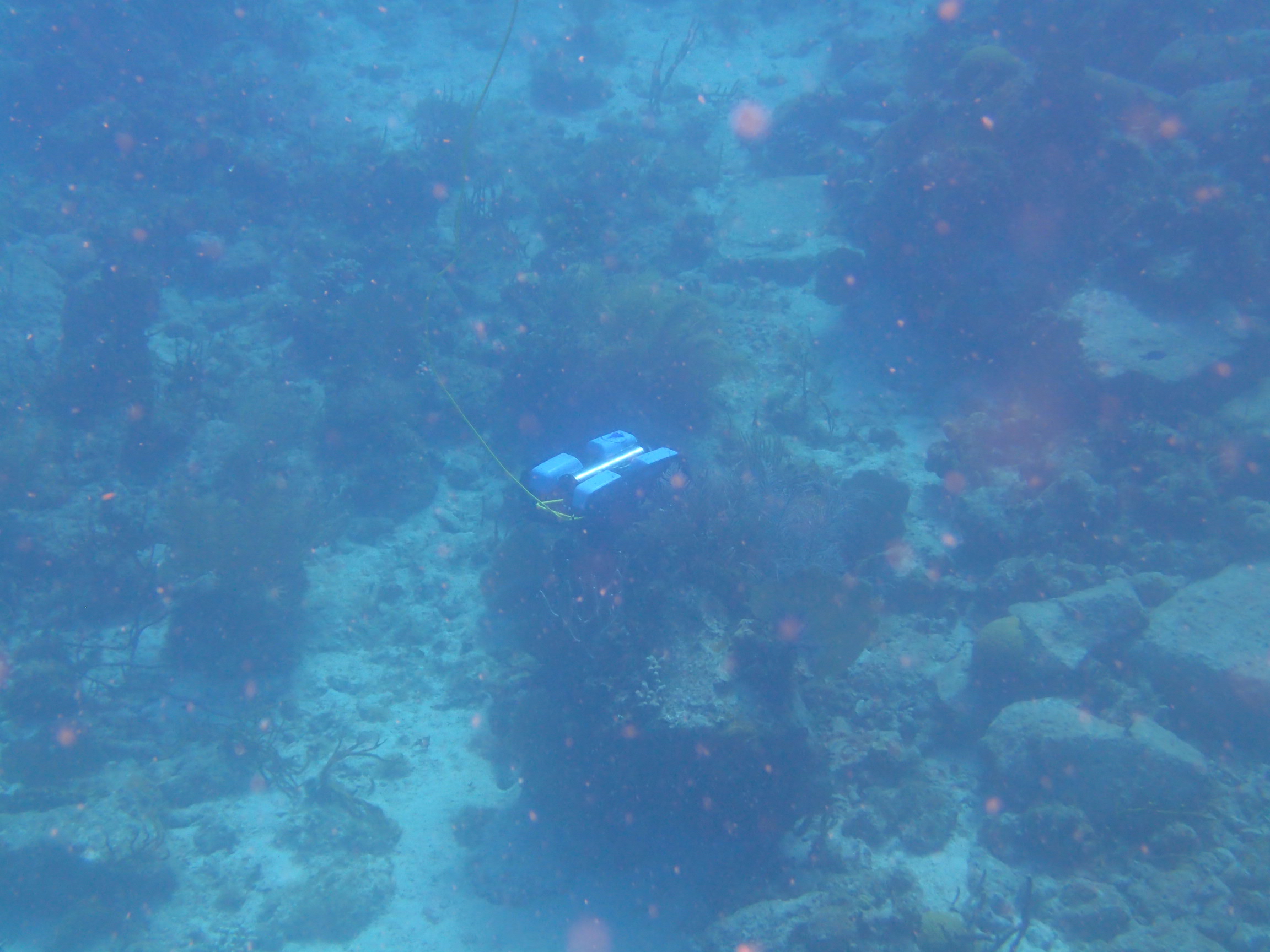
[Photo: Amy Apprill]
